Mudanças entre as edições de "Amazon Picking Challenge"
(→Professor do LCAD obtém a sétima colocação na Amazon Picking Challenge) |
(→Professor do LCAD obtém a sétima colocação na Amazon Picking Challenge) |
||
| Linha 4: | Linha 4: | ||
[[Arquivo:Photo-icra.jpg|480px|centro]] | [[Arquivo:Photo-icra.jpg|480px|centro]] | ||
| − | O professor Alberto F. De Souza, membro do Laboratório de Computação de Alto Desempenho, obteve a sétima colocação na Amazon Picking Challenge, uma competição de robótica autônoma promovida pela Amazon ([http://amazonpickingchallenge.org]). O professor Alberto, | + | O professor Alberto F. De Souza, membro do Laboratório de Computação de Alto Desempenho, participou de equipe que obteve a sétima colocação na Amazon Picking Challenge, uma competição de robótica autônoma promovida pela Amazon ([http://amazonpickingchallenge.org]). O professor Alberto, como parte de suas atividades de pós-doutoramento junto ao grupo do prof. Kostas Bekris, da Rutgers University (USA), desenvolveu hardware e software para o robô Motoman (SDA10, Yaskawa) utilizando várias tecnologias previamente desenvolvidas no LCAD. O resultado obtido coloca o LCAD, o PPGI e a UFES em um time que se encontra entre os 10 melhores em manipulação robótica autônoma do mundo. |
| Linha 12: | Linha 12: | ||
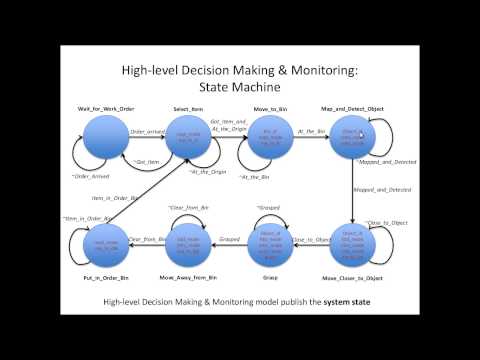
| − | Neste vídeo é apresentada a proposta inicial de sistema para o robô no início do projeto. A arquitetura do sistema final, utilizada na competição, é uma versão ligeiramente aprimorada. | + | Neste vídeo é apresentada a proposta inicial de sistema para o robô, elaborada no início do projeto. A arquitetura do sistema final, utilizada na competição, é uma versão ligeiramente aprimorada. |
[[Image:1.jpg|thumb|600px|centro|nenhum|link=http://youtu.be/M7ktnz32BA0]] | [[Image:1.jpg|thumb|600px|centro|nenhum|link=http://youtu.be/M7ktnz32BA0]] | ||
| Linha 22: | Linha 22: | ||
| − | O detector de objetos utilizado é uma versão | + | O detector de objetos utilizado é uma versão aprimorada do detector de objetos denominado Linemod. Este vídeo mostra um teste realizado após algumas das melhorias realizadas na versão publicamente disponível de Linemod. A versão final desenvolvida e utilizada na competição será disponibilizada como software livre. |
[[Image:3.jpg|thumb|600px|centro|nenhum|link=https://youtu.be/s_mtzXzKT7c]] | [[Image:3.jpg|thumb|600px|centro|nenhum|link=https://youtu.be/s_mtzXzKT7c]] | ||
| Linha 32: | Linha 32: | ||
| − | Vídeo submetido à | + | Vídeo submetido à Amazon em competição paralela promovida pela mesma para determinar a quem a empresa iria conceder uma estante e os objetos que seriam usados na competição. Nele é possível ver o planejador de movimentos do grupo do prof. Bekris empregado em simulações. |
[[Image:5.jpg|thumb|600px|centro|nenhum|link=https://youtu.be/eFRg8EhO2Uk]] | [[Image:5.jpg|thumb|600px|centro|nenhum|link=https://youtu.be/eFRg8EhO2Uk]] | ||
| − | Vídeo submetido ao fabricante do robô | + | Vídeo submetido ao fabricante do robô usado na competição, Motoman SDA10F, fabricado pela Yaskawa. Graças a este vídeo a Rutgers ganhou por empréstimo (por 6 meses) um robô de ~U$150,000.00. |
[[Image:6.jpg|thumb|600px|centro|nenhum|link=https://youtu.be/-Lz8SbGRlmw]] | [[Image:6.jpg|thumb|600px|centro|nenhum|link=https://youtu.be/-Lz8SbGRlmw]] | ||
| Linha 52: | Linha 52: | ||
| − | Este manipulador a vácuo foi projetado pelo professor Alberto especialmente para a competição. | + | Este manipulador a vácuo foi projetado pelo professor Alberto, em conjunto com a empresa Unigripper (http://www.unigripper.com) especialmente para a competição. |
[[Arquivo:Photo_1.JPG|thumb|480px|centro|Rascunho a mão do projeto do manipulador vácuo desenvolvido para a competição]] | [[Arquivo:Photo_1.JPG|thumb|480px|centro|Rascunho a mão do projeto do manipulador vácuo desenvolvido para a competição]] | ||
| − | Todos os pontos obtidos na competição | + | Todos os pontos obtidos na competição foram alcançados com dele. A estrutura física básica dele foi implementada pela empresa Unigripper (http://www.unigripper.com). Mas o acionamento eletrônico, assim como o driver de acionamente computacional, foram implementados pelo prof. Alberto. A Rutgers ganhou o apoio da Unigripper em uma competição paralela à Amazon Picking Challenge promovida pela empresa. |
[[Image:9.jpg|thumb|600px|centro|nenhum|link=https://www.youtube.com/watch?v=4hWTLhXAjyA]] | [[Image:9.jpg|thumb|600px|centro|nenhum|link=https://www.youtube.com/watch?v=4hWTLhXAjyA]] | ||
| Linha 77: | Linha 77: | ||
| − | + | O mesmo vídeo 5x mais rápido: | |
[[Image:13.jpg|thumb|600px|centro|nenhum|link=https://youtu.be/8bXFiNWPc3E]] | [[Image:13.jpg|thumb|600px|centro|nenhum|link=https://youtu.be/8bXFiNWPc3E]] | ||
Edição das 20h37min de 5 de julho de 2015
Professor do LCAD obtém a sétima colocação na Amazon Picking Challenge

O professor Alberto F. De Souza, membro do Laboratório de Computação de Alto Desempenho, participou de equipe que obteve a sétima colocação na Amazon Picking Challenge, uma competição de robótica autônoma promovida pela Amazon ([1]). O professor Alberto, como parte de suas atividades de pós-doutoramento junto ao grupo do prof. Kostas Bekris, da Rutgers University (USA), desenvolveu hardware e software para o robô Motoman (SDA10, Yaskawa) utilizando várias tecnologias previamente desenvolvidas no LCAD. O resultado obtido coloca o LCAD, o PPGI e a UFES em um time que se encontra entre os 10 melhores em manipulação robótica autônoma do mundo.
Reportagem da Bloomberg sobre a Amazon Picking Challenge com vídeo com entrevista do prof. Alberto.
Neste vídeo é apresentada a proposta inicial de sistema para o robô, elaborada no início do projeto. A arquitetura do sistema final, utilizada na competição, é uma versão ligeiramente aprimorada.
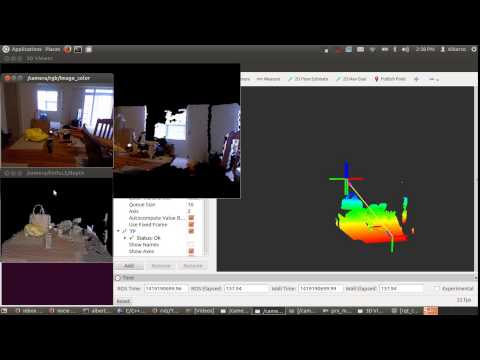
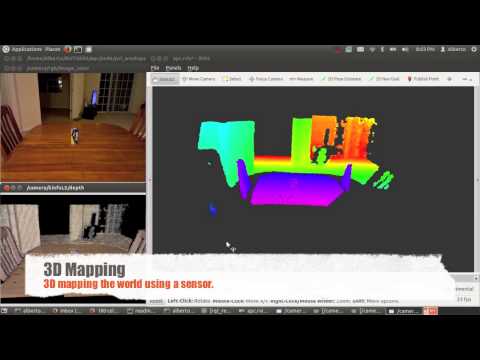
Neste vídeo, sao apresentados os sistemas de mapeamento, localização e detecção de objetos preliminares.
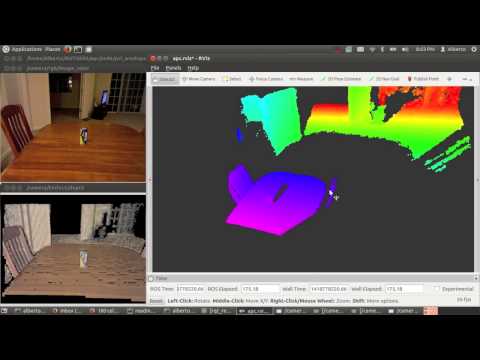
O detector de objetos utilizado é uma versão aprimorada do detector de objetos denominado Linemod. Este vídeo mostra um teste realizado após algumas das melhorias realizadas na versão publicamente disponível de Linemod. A versão final desenvolvida e utilizada na competição será disponibilizada como software livre.

Neste vídeo é apresentado o robô Baxter realizando todas as principais tarefas da competição. A Rutgers já possuia este robô, que foi utilizado na fase preliminar do projeto. O professor Alberto era o responsável pelos subsistemas de tomada de decisão, mapeamento, localização e detecção de objetos, equanto que a equipe do prof. Bekris era responsável pela parte de planejamento do movimento do robô (especialidade da equipe do prof. Bekris). Contudo, neste vídeo o sistema de planejamento dos movimentos do robô utilizado também foi desenvolvido pelo prof. Alberto com base no software MoveIt!, disponível na forma de software livre. A detecção de objetos ainda era viabilizada por uma versão preliminar do sistema utilizado na competição.

Vídeo submetido à Amazon em competição paralela promovida pela mesma para determinar a quem a empresa iria conceder uma estante e os objetos que seriam usados na competição. Nele é possível ver o planejador de movimentos do grupo do prof. Bekris empregado em simulações.
Vídeo submetido ao fabricante do robô usado na competição, Motoman SDA10F, fabricado pela Yaskawa. Graças a este vídeo a Rutgers ganhou por empréstimo (por 6 meses) um robô de ~U$150,000.00.
Vídeo submetido para a Amazon em uma competição paralela para receber apoio para transportar o robô para a competição (a Rutgers ganhou o apoio).

Versão mais avançada do sistema desenvolvido rodando no Baxter e pegando objetos na estante da competição.
Este manipulador a vácuo foi projetado pelo professor Alberto, em conjunto com a empresa Unigripper (http://www.unigripper.com) especialmente para a competição.

Todos os pontos obtidos na competição foram alcançados com dele. A estrutura física básica dele foi implementada pela empresa Unigripper (http://www.unigripper.com). Mas o acionamento eletrônico, assim como o driver de acionamente computacional, foram implementados pelo prof. Alberto. A Rutgers ganhou o apoio da Unigripper em uma competição paralela à Amazon Picking Challenge promovida pela empresa.

Neste vídeo, o prof. Alberto apresenta o sistema completo que ele desenvolveu (inclusive o planejamento de movimento) rodando com a parte de mapeamento, localização e detecção de objetos no mundo real, mas simulando o robô utilizado na competição.
Neste vídeo é apresentada a versão final do sistema utilizado na competição sendo empregada no robô utilizado na competição. No vídeo, o robô Motoman SDA10F realiza com sucesso uma das tarefas da competição.

Neste vídeo é novamente apresentada a versão final do sistema utilizado na competição sendo empregada no robô utilizado na competição. No vídeo, o robô Motoman SDA10F realiza com sucesso várias das tarefas da competição:

O mesmo vídeo 5x mais rápido:

Apenas o robô, 5x:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}