Mudanças entre as edições de "Arquivo:Resumo A Particle Filter-based Lane Marker Tracking Approach using a Cubic Spline Model.jpg"
(Overview of our lane marker tracking system: from a sequence of frames (a), the Inverse Perspective Mapping is applied (b) and the lane marker is detected and tracked with the use of a particle filter (c). The output (d) are tracked lane markers modele...) |
(Sem diferença)
|
{kind=link}
{kind=link}
Edição atual tal como às 13h47min de 22 de outubro de 2015
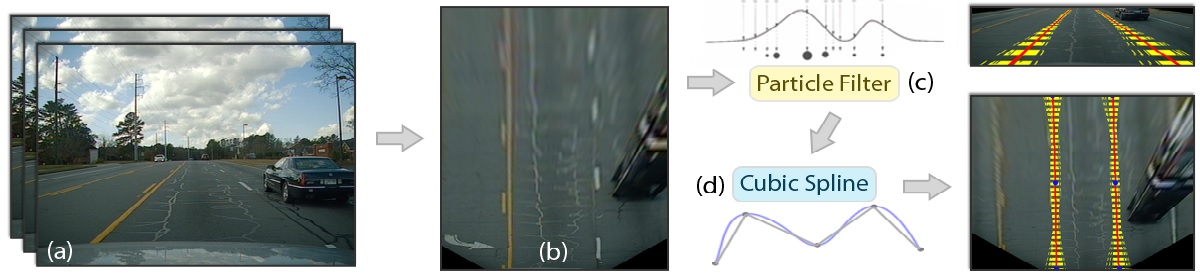
Overview of our lane marker tracking system: from a sequence of frames (a), the Inverse Perspective Mapping is applied (b) and the lane marker is detected and tracked with the use of a particle filter (c). The output (d) are tracked lane markers modeled by cubic splines for each side. Yellow splines represent all the particles and the red one represents the output, a virtual best particle. The system reports an error of 0.0143 meters with 98.13% of precision.
Histórico do arquivo
Clique em uma data/horário para ver como o arquivo estava em um dado momento.
| Data e horário | Miniatura | Dimensões | Usuário | Comentário | |
|---|---|---|---|---|---|
| atual | 13h47min de 22 de outubro de 2015 | 1 200 × 275 (92 kB) | Thiago Oliveira dos Santos (discussão | contribs) | Overview of our lane marker tracking system: from a sequence of frames (a), the Inverse Perspective Mapping is applied (b) and the lane marker is detected and tracked with the use of a particle filter (c). The output (d) are tracked lane markers modele... |
{kind=link}
- Você não pode substituir este arquivo.
Uso do arquivo
A página a seguir tem link para este arquivo:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}