Amazon Picking Challenge
LCAD Professor Achieves 7th Place at the Amazon Picking Challenge

Professor Alberto F. De Souza, coordinator of the High-Performance Computing Laboratory (LCAD), was part of a team that achieved 7th place at the Amazon Picking Challenge, an autonomous robotics competition organized by Amazon ([1]). As part of his postdoctoral activities with Prof. Kostas Bekris's group (https://pracsys.cs.rutgers.edu/) at Rutgers University (USA), Professor Alberto developed hardware and software for the Motoman robot (SDA10F, Yaskawa - https://www.motoman.com/en-us/products/robots/industrial/assembly-handling/sda-series/sda10f) using various technologies previously developed at LCAD. This result places LCAD, PPGI, and UFES among the top 10 teams in autonomous robotic manipulation worldwide.
Bloomberg article about the Amazon Picking Challenge featuring a video interview with Prof. Alberto.
[2]
Video showing the final version of the system developed for the competition (5x speed for better visualization):

Robot only:

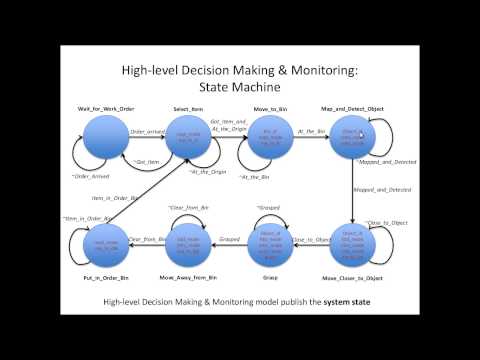
This video presents the initial system proposal for the robot, designed at the beginning of the project. The final system architecture used in the competition is a slightly improved version.
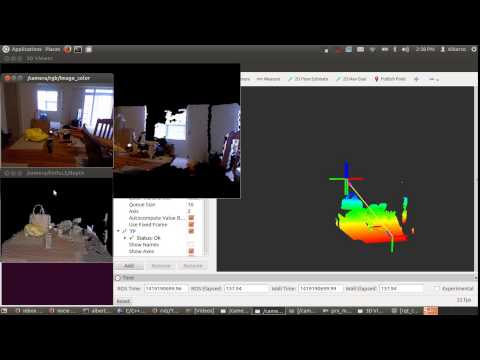
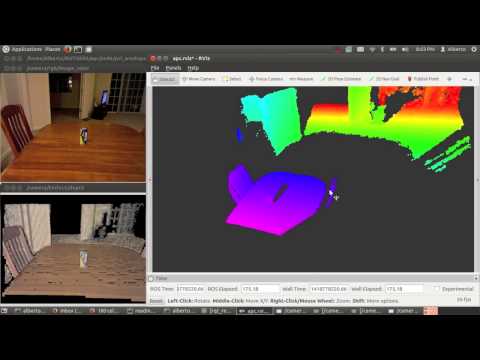
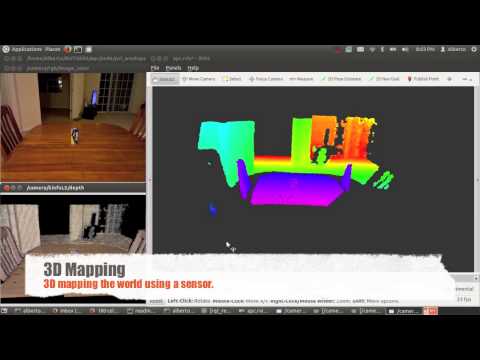
This video presents the preliminary mapping, localization, and object detection systems.
The object detector used is an improved version of the Linemod detector. This video shows a test performed after some improvements were made to the publicly available version of Linemod. The final version developed and used in the competition will be released as open-source software.

This video shows the Baxter robot performing all the main competition tasks. Rutgers already had this robot, which was used in the preliminary phase of the project. Professor Alberto was responsible for the decision-making, mapping, localization, and object detection subsystems, while Prof. Bekris's team was responsible for the robot motion planning (Prof. Bekris's team specialty). However, in this video, the robot motion planning system was also developed by Prof. Alberto based on the MoveIt! software, available as open source. Object detection was still enabled by a preliminary version of the system used in the competition.

Video submitted to Amazon in a parallel competition to determine who would receive a shelf and the objects to be used in the competition. In it, you can see Prof. Bekris's group motion planner being used in simulations.
Video submitted to the manufacturer of the robot used in the competition, Motoman SDA10F, manufactured by Yaskawa. Thanks to this video, Rutgers was loaned (for 6 months) a robot worth ~US$150,000.00.
Video submitted to Amazon in a parallel competition to receive support to transport the robot to the competition (Rutgers won the support).

More advanced version of the system running on Baxter and picking objects from the competition shelf.
This vacuum gripper was designed by Professor Alberto, in collaboration with the company Unigripper (http://www.unigripper.com), specifically for the competition.

All points scored in the competition were achieved using it. The basic physical structure was implemented by the company Unigripper (http://www.unigripper.com). However, the electronic actuation, as well as the computational driver, were implemented by Prof. Alberto. Rutgers won Unigripper's support in a parallel competition to the Amazon Picking Challenge organized by the company.

In this video, Prof. Alberto presents the complete system he developed (including motion planning) running with the mapping, localization, and object detection components in the real world, but simulating the robot used in the competition.
This video presents the final version of the system used in the competition being employed on the competition robot. In the video, the Motoman SDA10F robot successfully performs one of the competition tasks.

This video again presents the final version of the system used in the competition being employed on the competition robot. In the video, the Motoman SDA10F robot successfully performs several competition tasks:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
The same video at 5x speed:
Robot only, 5x: